I'm currently an AI researcher at Reality Labs, Meta, working on cutting-edge challenges at the intersection of machine learning and computer vision. Before joining Meta, I spent more than eight years in the autonomous driving industry, contributing to research efforts at Cruise and Uber ATG. I earned my PhD from the University of Illinois Urbana-Champaign, where my research focused on computer vision.
Publications

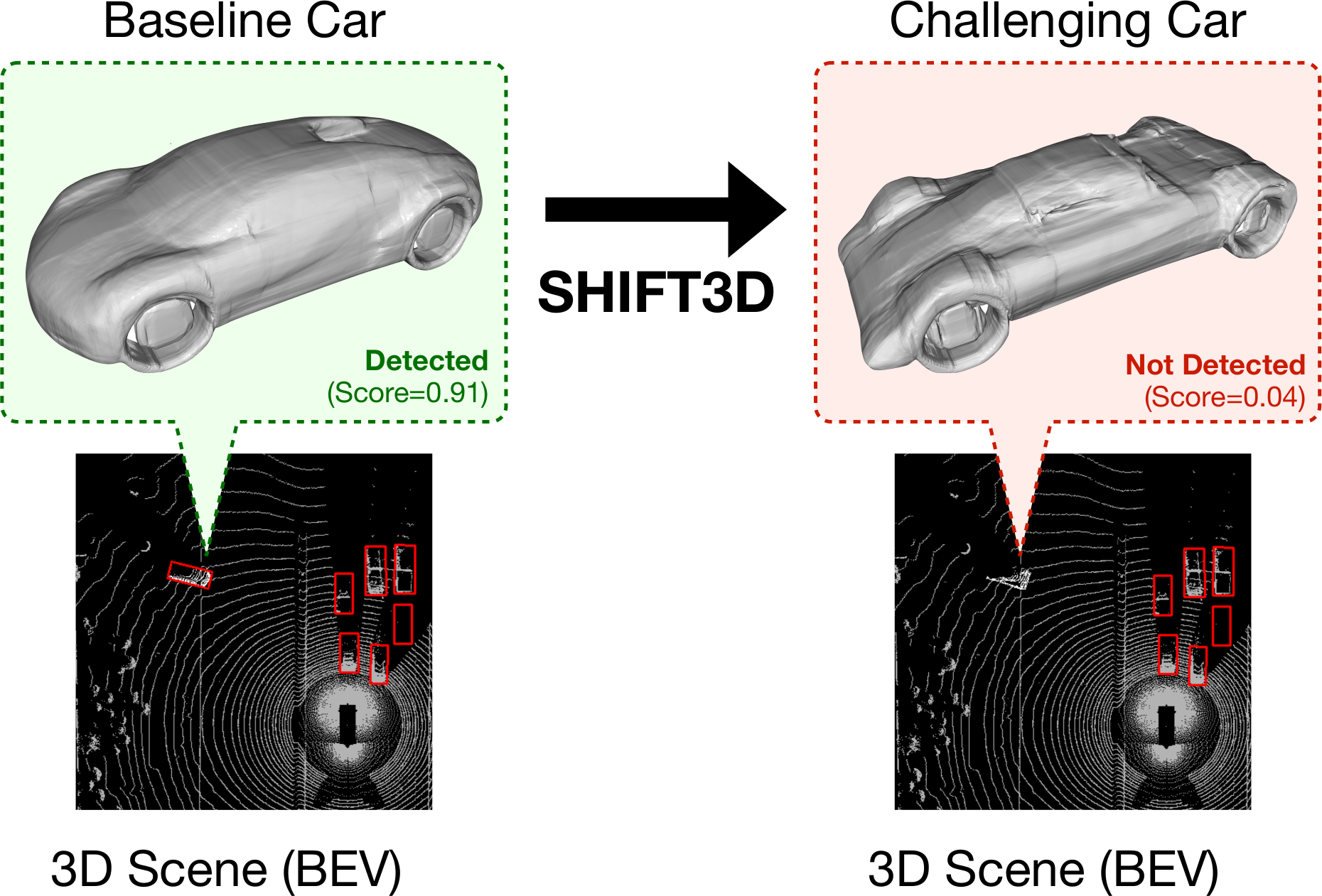
Generative Data Mining with Longtail-Guided Diffusion
D. S. Hayden, M. Ye, T. Garipov, G. P. Meyer, C. Vondrick, Z. Chen, Y. Chai, E. M. Wolff, S. Srinivasa
International Conference on Machine Learning (ICML), 2025
PDF
D. S. Hayden, M. Ye, T. Garipov, G. P. Meyer, C. Vondrick, Z. Chen, Y. Chai, E. M. Wolff, S. Srinivasa
International Conference on Machine Learning (ICML), 2025

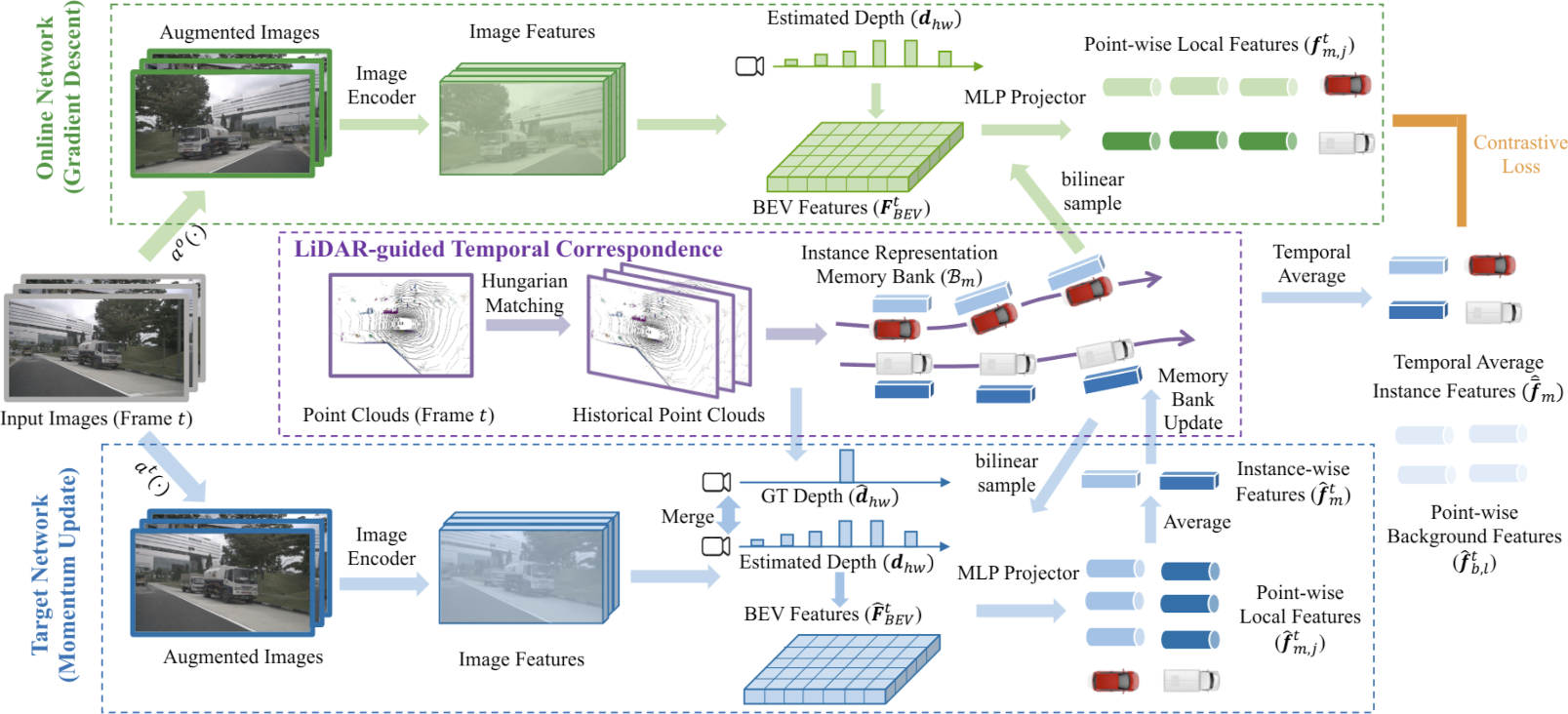
Cohere3D: Exploiting Temporal Coherence for Unsupervised Representation Learning of Vision-based Autonomous Driving
Y. Xie, H. Chen, G. P. Meyer, Y. J. Lee, E. M. Wolff, M. Tomizuka, W. Zhan, Y. Chai, X. Huang
IEEE International Conference on Robotics and Automation (ICRA), 2025
PDF
Y. Xie, H. Chen, G. P. Meyer, Y. J. Lee, E. M. Wolff, M. Tomizuka, W. Zhan, Y. Chai, X. Huang
IEEE International Conference on Robotics and Automation (ICRA), 2025

VLMine: Long-Tail Data Mining with Vision Language Models
M. Ye, G. P. Meyer, Z. Zhang, D. Park, S. K. Mustikovela, Y. Chai, E. M. Wolff
IEEE/CVF Winter Conference on Applications of Computer Vision Workshops (WACVW), 2025
PDF
M. Ye, G. P. Meyer, Z. Zhang, D. Park, S. K. Mustikovela, Y. Chai, E. M. Wolff
IEEE/CVF Winter Conference on Applications of Computer Vision Workshops (WACVW), 2025

VLM-AD: End-to-End Autonomous Driving through Vision-Language Model Supervision
Y. Xu, Y. Hu, Z. Zhang, G. P. Meyer, S. K. Mustikovela, S. Srinivasa, E. M. Wolff, X. Huang
Arxiv, 2024
PDF
Y. Xu, Y. Hu, Z. Zhang, G. P. Meyer, S. K. Mustikovela, S. Srinivasa, E. M. Wolff, X. Huang
Arxiv, 2024

VLM-KD: Knowledge Distillation from VLM for Long-Tail Visual Recognition
Z. Zhang, G. P. Meyer, Z. Lu, A. Shrivastava, A. Ravichandran, E. M. Wolff
Arxiv, 2024
PDF
Z. Zhang, G. P. Meyer, Z. Lu, A. Shrivastava, A. Ravichandran, E. M. Wolff
Arxiv, 2024
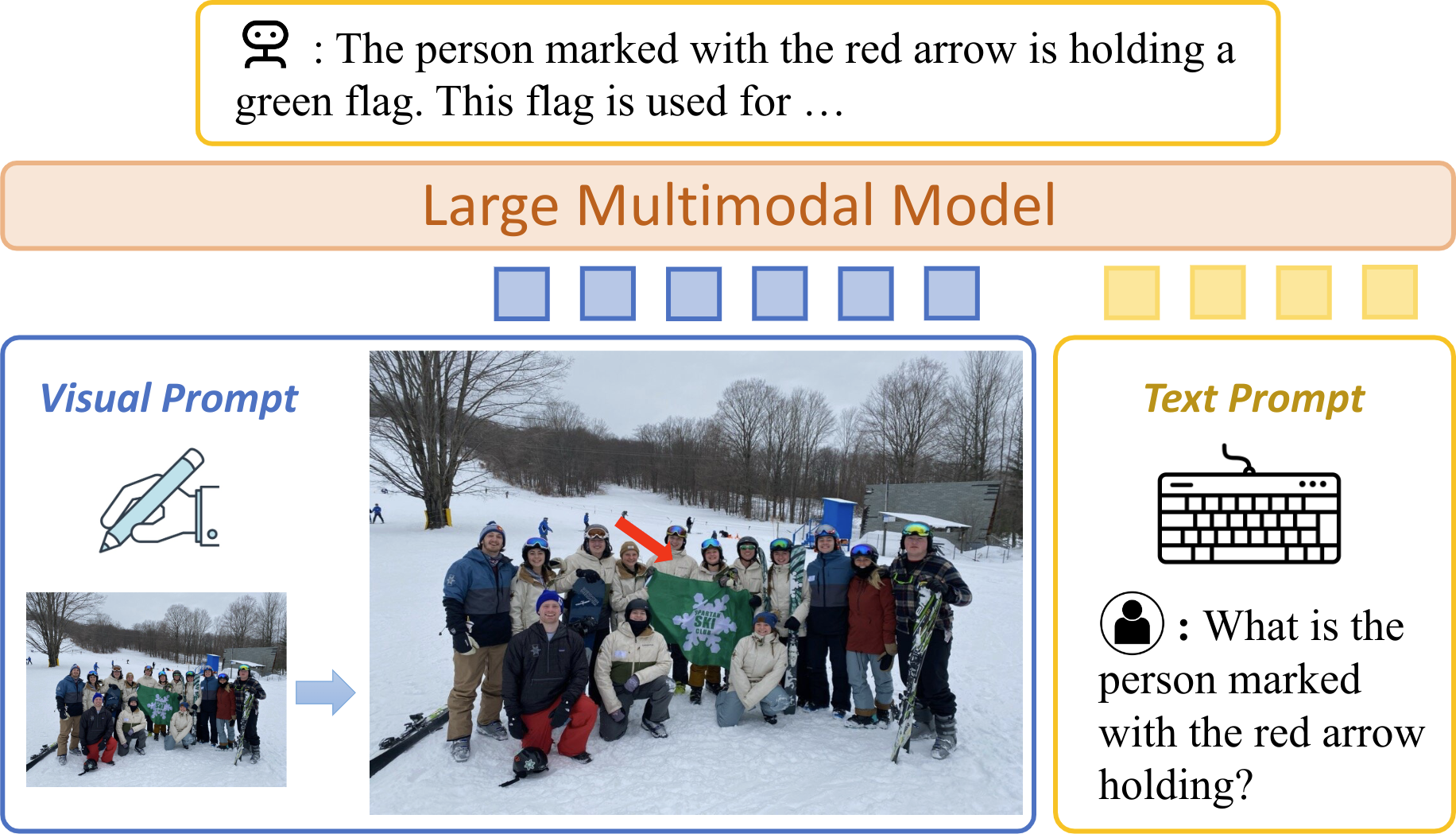
ViP-LLaVA: Making Large Multimodal Models Understand Arbitrary Visual Prompts
M. Cai, H. Liu, D. Park, S. K. Mustikovela, G. P. Meyer, Y. Chai, Y. J. Lee
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024
PDF Project Page
M. Cai, H. Liu, D. Park, S. K. Mustikovela, G. P. Meyer, Y. Chai, Y. J. Lee
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024
PDF Project Page
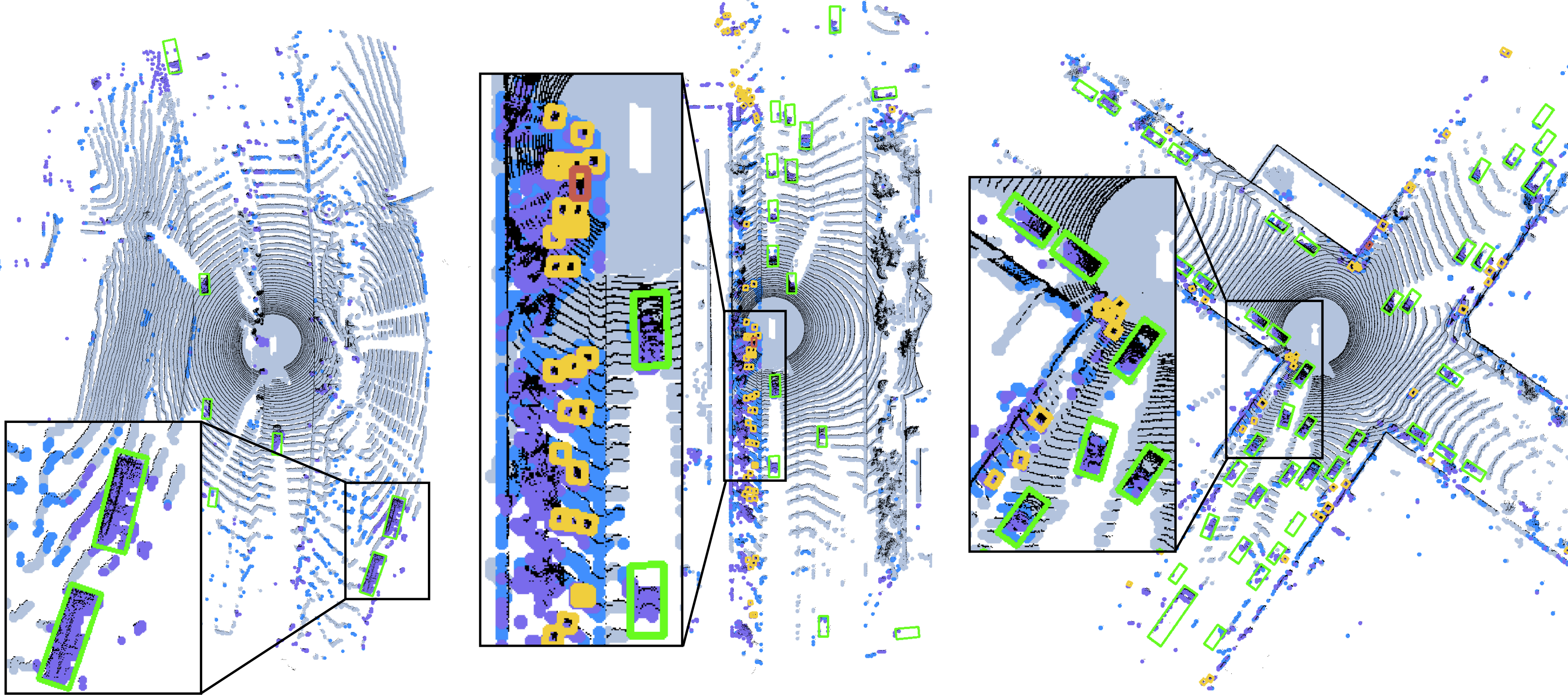
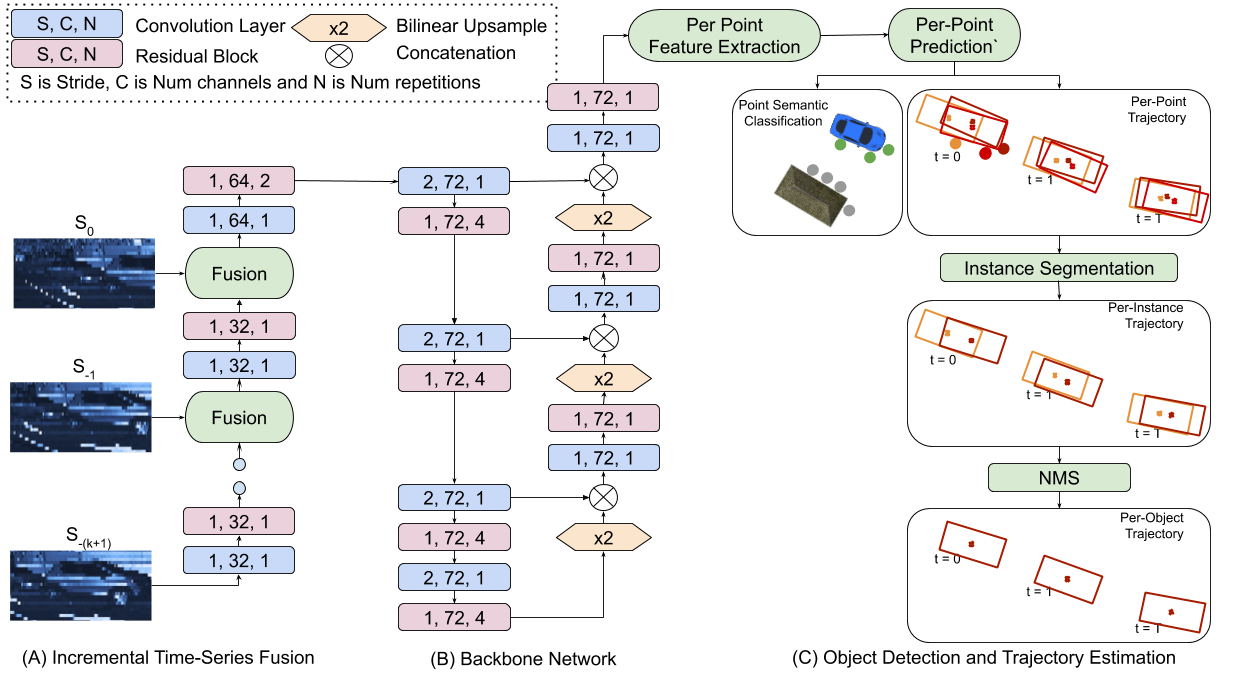
RV-FuseNet: Range View Based Fusion of Time-Series LiDAR Data for Joint 3D Object Detection and Motion Forecasting
A. Laddha, S. Gautam, G. P. Meyer, C. Vallespi-Gonzalez, C. K. Wellington
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
PDF
A. Laddha, S. Gautam, G. P. Meyer, C. Vallespi-Gonzalez, C. K. Wellington
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
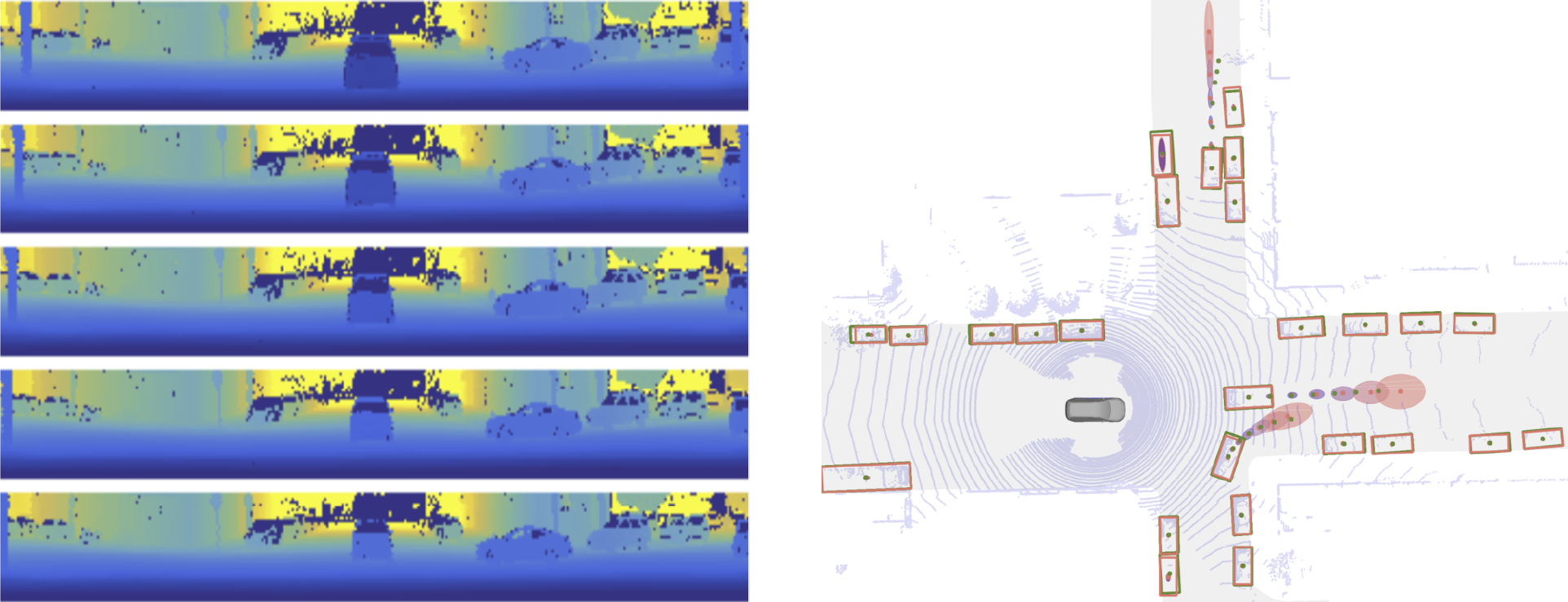
SDVTracker: Real-Time Multi-Sensor Association and Tracking for Self-Driving Vehicles
S. Gautam, G. P. Meyer, C. Vallespi-Gonzalez, B. C. Becker
IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), 2021
PDF
S. Gautam, G. P. Meyer, C. Vallespi-Gonzalez, B. C. Becker
IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), 2021
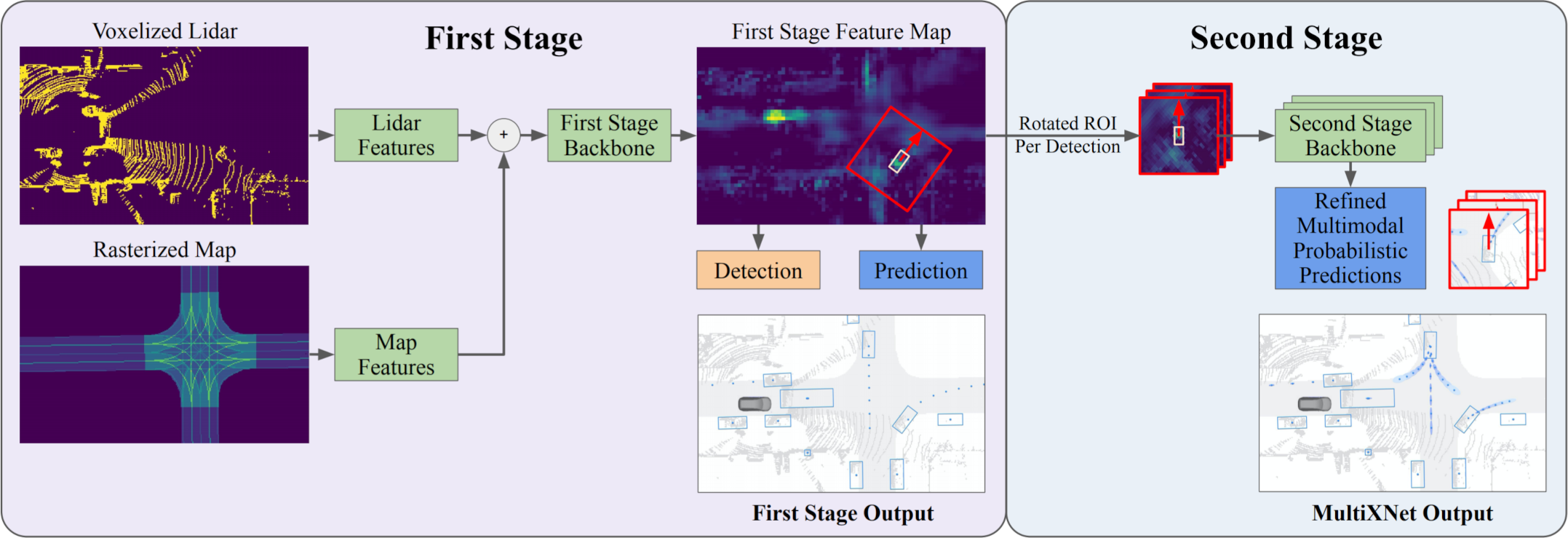
MultiXNet: Multiclass Multistage Multimodal Motion Prediction
N. Djuric, H. Cui, Z. Su, S. Wu, H. Wang, F.-C. Chou, L. San Martin, S. Feng, R. Hu, Y. Xu, A. Dayan, S. Zhang, B. C. Becker, G. P. Meyer, C. Vallespi-Gonzalez, C. K. Wellington
IEEE Intelligent Vehicles Symposium (IV), 2021
PDF
N. Djuric, H. Cui, Z. Su, S. Wu, H. Wang, F.-C. Chou, L. San Martin, S. Feng, R. Hu, Y. Xu, A. Dayan, S. Zhang, B. C. Becker, G. P. Meyer, C. Vallespi-Gonzalez, C. K. Wellington
IEEE Intelligent Vehicles Symposium (IV), 2021
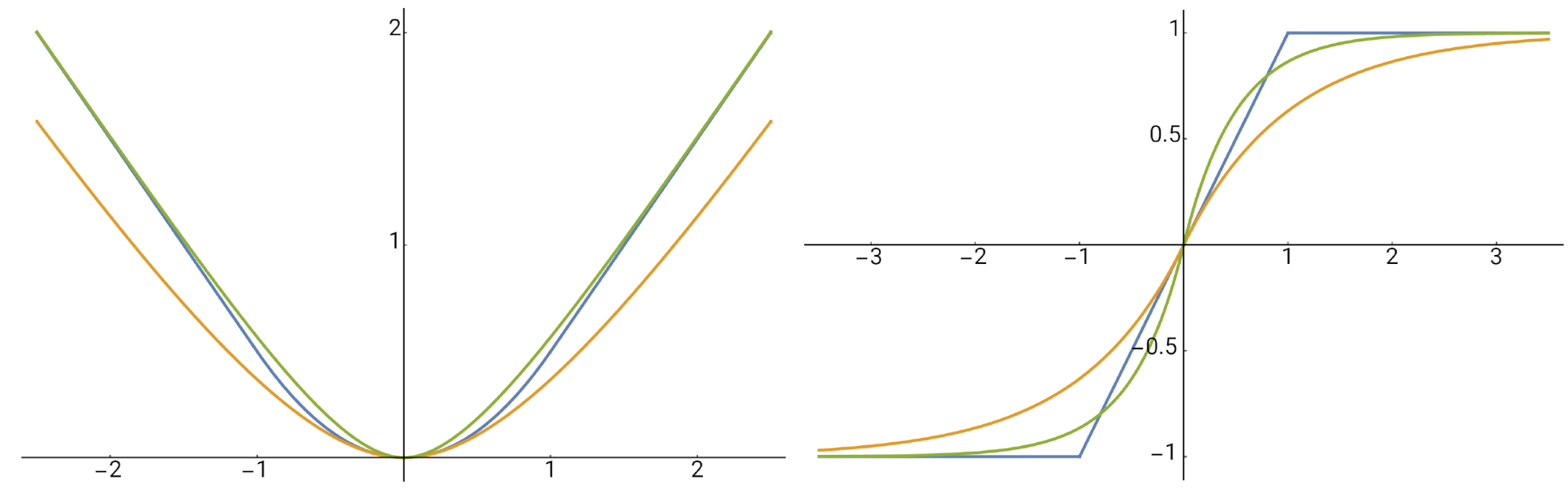
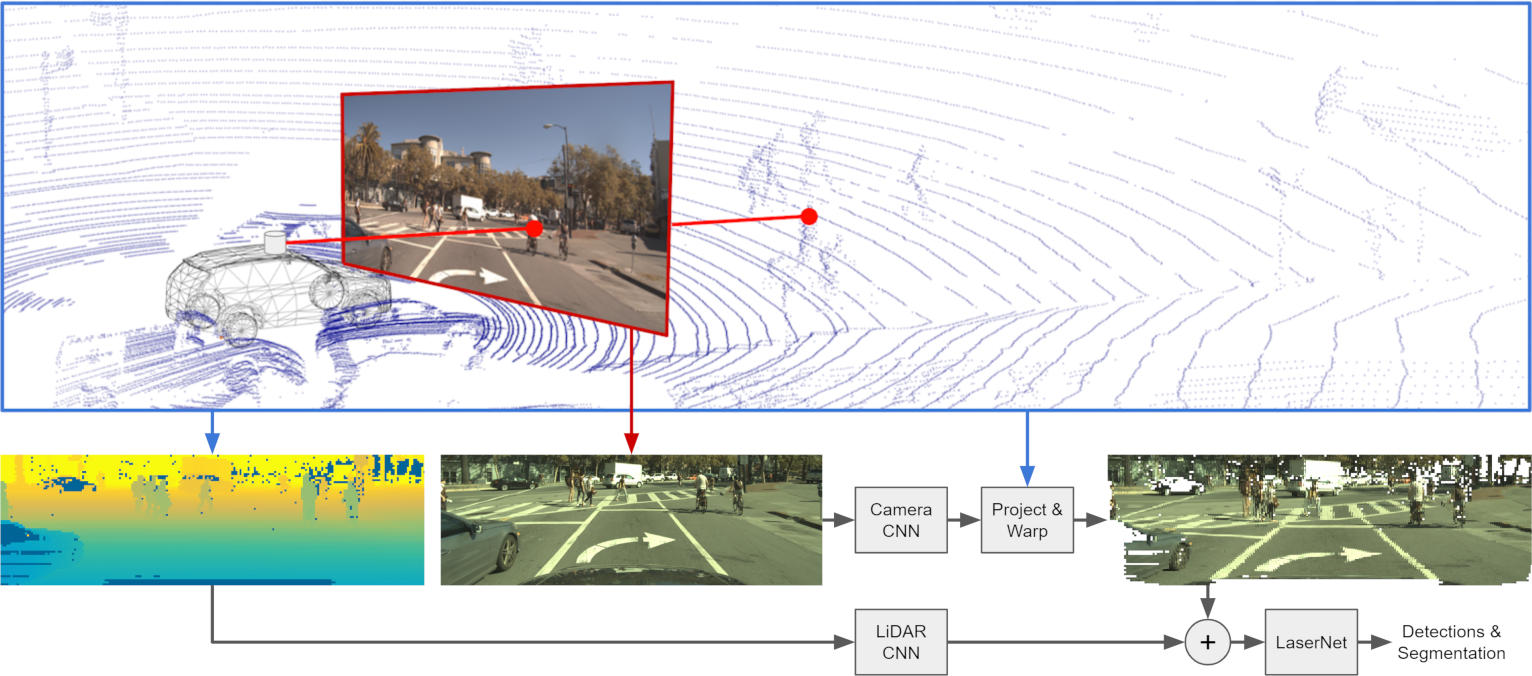
LaserFlow: Efficient and Probabilistic Object Detection and Motion Forecasting
G. P. Meyer, J. Charland, S. Pandey, A. Laddha, S. Gautam, C. Vallespi-Gonzalez, C. K. Wellington
IEEE Robotics and Automation Letters (RA-L), 2020
Best Paper Award
PDF Video
G. P. Meyer, J. Charland, S. Pandey, A. Laddha, S. Gautam, C. Vallespi-Gonzalez, C. K. Wellington
IEEE Robotics and Automation Letters (RA-L), 2020
Best Paper Award
PDF Video

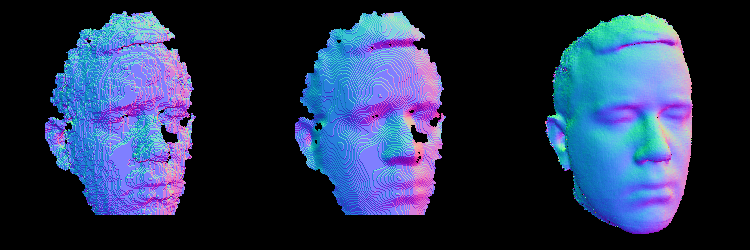
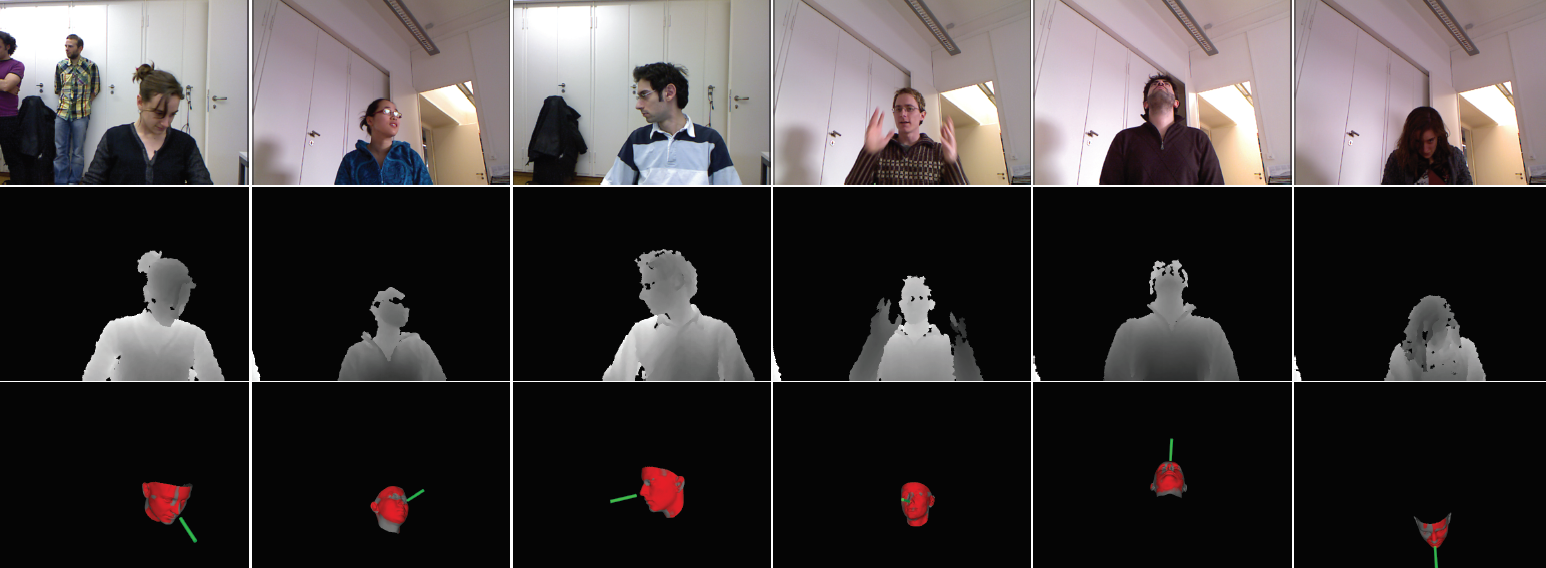
Real-time 3D Face Verification with a Consumer Depth Camera
G. P. Meyer and M. N. Do
Conference on Computer and Robot Vision (CRV), 2018
PDF
G. P. Meyer and M. N. Do
Conference on Computer and Robot Vision (CRV), 2018

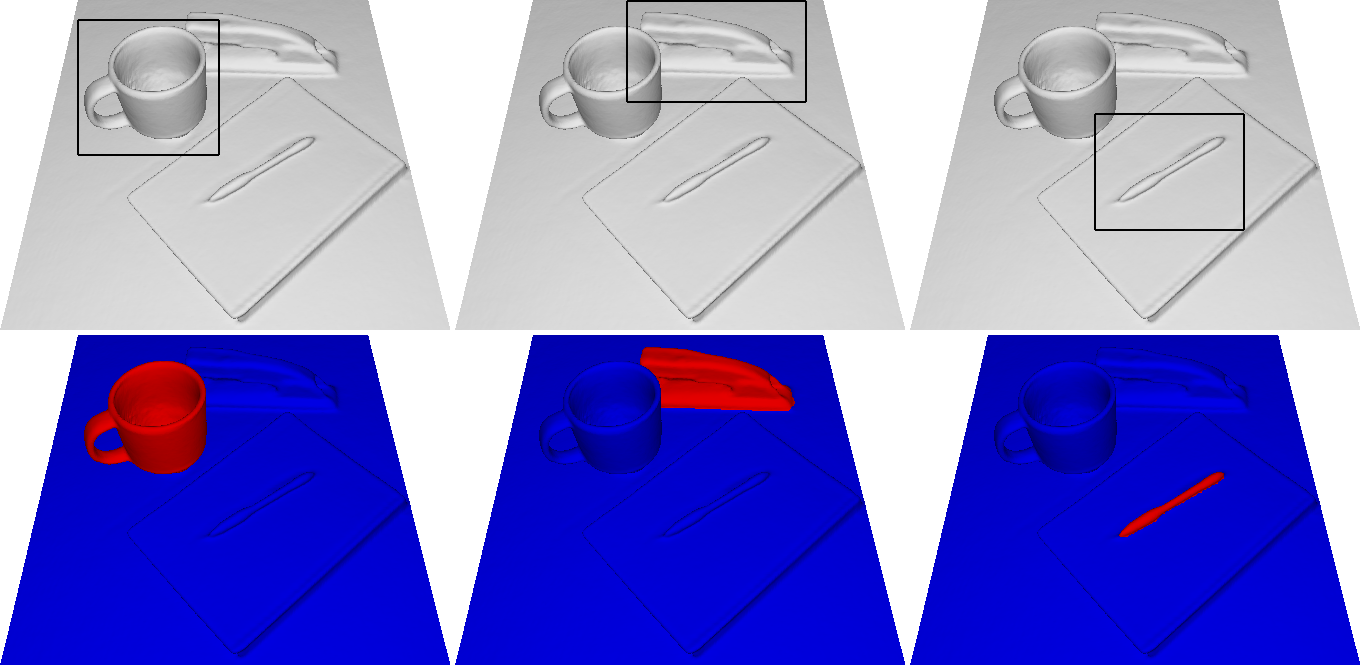
3D GrabCut: Interactive Foreground Extraction for Reconstructed 3D Scenes
G. P. Meyer and M. N. Do
Eurographics Workshop on 3D Object Retrieval (3DOR), 2015
PDF
G. P. Meyer and M. N. Do
Eurographics Workshop on 3D Object Retrieval (3DOR), 2015